This website uses cookies to ensure you get the best experience on our website.
Read more

VIDEO: How Does the PID Control Work in an ATC2000?
April 28, 2022
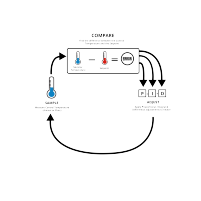
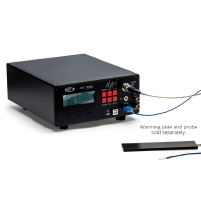
The ATC2000 is a low noise heating system for maintaining animal body temperature during experimental procedures. The ATC2000 uses a digital PID controller to regulate the application of power to the heating plate to achieve the desired temperature at the monitored sensor. PID stands for Proportional, Integral and Differential. Here’s how PID control works:
The default set point is 37°C, but you can configure it. The controller calculates the error, which is the difference between the present temperature and the desired temperature.
Error = Monitored temperature – Set point
Three individual components are derived by applying different functions to the error.
The default set point is 37°C, but you can configure it. The controller calculates the error, which is the difference between the present temperature and the desired temperature.
Error = Monitored temperature – Set point
Three individual components are derived by applying different functions to the
- The error is multiplied by the proportional gain factor (P) that you can adjust
- The error is accumulated to constitute the integral, which is multiplied by the integral gain factor (I) that you can adjust.
- The error is subtracted from the previous value of the error to determine the difference. It is then multiplied by the differential term (D) which you may also adjust.
These three components are added together to form the stimulus input applied to the system. The system produces a temperature value which is fed back to be compared with the set point once more. Then, the cycle repeats until the error is zero, meaning that the output is at the desired set point.
Proportional Gain Effect
The proportional gain is fast acting, and it does not change with time when the error is constant. The proportional gain alone brings the system close to the desired value, because the proportional control limits the amount of fluctuation of the temperature around the set point value as the controller stabilizes. However, if the proportional control is used alone after the temperature has stabilized, then the actual temperature approaches the set point, but never quite reaches it. Too much proportional gain causes the system to oscillate, going above and below the set point.
Integral Gain Effect
The integral gain changes with time as the error accumulates. This gain factor changes until the system reaches the set point. At this point it remains stationary until the error creeps up or down. The integral gain factor is responsible for long term stability. Too much integral gain also causes oscillation.
Differential Gain Effect
The differential gain factor is seldom used. This term is mainly used to reduce the initial overshoot in a rapidly changing system. The default factory settings for the differential gain is zero. The functionality is still implemented and available. For systems with a considerable delay in reacting to stimulus, it may be difficult to use effectively.
To recap the process, the monitored temperature is compared with the set point to determine the error, and then the P, I and D algorithms are applied to the error value. The PID values are added together to determine the command sent to the heater. The output changes the monitored temperature, and the cycle repeats.
If you have any questions, just give us a call at (866) 606-1974 or email us at [email protected].
Related Articles
-
ATC2000 Features New Adaptive Mode Technology
 Oct 03
Oct 03 -
VIDEO: Troubleshooting the ATC2000
 May 02
May 02 -
VIDEO: Using the Adaptive Mode on the ATC2000
 Aug 05
Aug 05 -
VIDEO: How to Reset the Factory Defaults on the ATC2000
 May 04
May 04 -
VIDEO: How to Adjust the ATC2000 PID Parameters
 Apr 29
Apr 29 -
VIDEO: How to Set the Configuration Parameters for the ATC2000
 Apr 27
Apr 27 -
VIDEO: How to Set the Controlled Temperature for the ATC2000
 Apr 25
Apr 25 -
VIDEO: How to Understand the ATC2000 Display
 Apr 20
Apr 20 -
WPI's Low-Noise Amplifiers Outperform Cheap Imitations
 Apr 30
Apr 30 -
VIDEO: Setting up the 3D SpectaSCOPE™ - Part 1
 Feb 23
Feb 23
Related Products
- As low as $129.00As low as $695.00







Recent Posts

Close