This website uses cookies to ensure you get the best experience on our website.
Read more



SU-MPC385 Motorized Micromanipulator Systems
As low as
$11,833.00
Only %1 left
Prices valid in USA, Canada, and PR only.
Order code
Price range: $11,833 - $34,867

Prices valid in USA, Canada, and PR only.
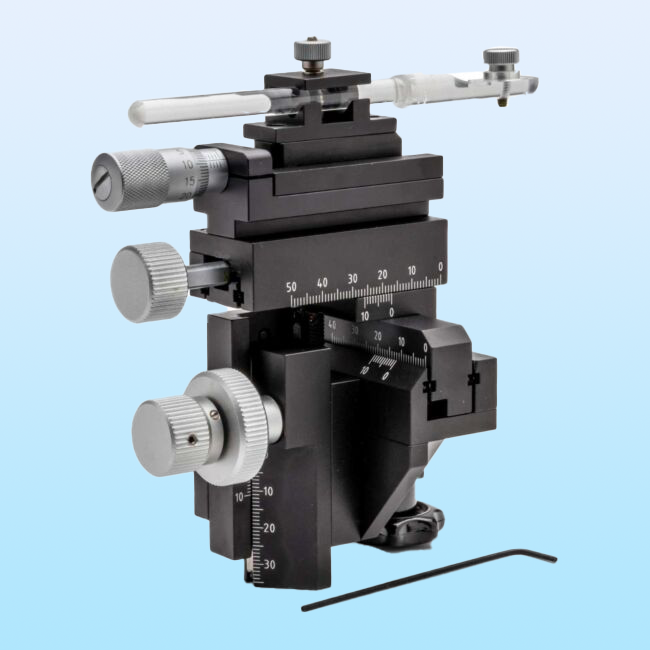
The flagship in our line of precision micromanipulators, the motorized SU-MP285 is affordable yet offers advanced features found in manipulators costing thousands more. Custom engineered stepping motors, precision cross-roller bearing slides and proprietary worm gear capstan drives form the basis of the watch-like mechanical system. The controller provides power to the stage motors with a quiet linear power supply to minimize electrical noise radiation in your setup. Pipette holders and headstages are securely mounted to the SU-MP285 with one of our several unique and rigid mounting systems.
Prices valid in USA, Canada, and PR only.
Custom engineered stepping motors, precision cross-roller bearing slides and proprietary worm gear capstan drives form the basis of the watch-like mechanical systems
Features
- Submicron resolution and integrated coarse positioning
- 1 inch of motorized travel on all three axes
- Virtual 4th axis with user-selected angle for axial drive
- Specify left or right hand when ordering
Options
| Order code | Controllers | # Manipulators |
| SU-MPC385 | One MPC-200 Controller | 1 - SU-MP285 Manipulator |
| SU-MPC385-2 | One MPC-200 Controller | 2 - SU-MP285 Manipulators |
| SU-MPC385-3 | Two MPC-200 Controllers | 3 - SU-MP285 Manipulators |
| SU-MPC385-4 | Two MPC-200 Controllers | 4 - SU-MP285 Manipulators |
Benefits
- Quietest electronics in the industry optomized for single channel recording
- Highly stable for experiments intolerant of pipette drift
- Adjustable speed and resolution allows optimization for your experimental setup
- Programmable robotics for complex motion sequences
- Continuous display (in microns) of axes positions
- Switch between continuous or single step movement
- Absolute and relative origins
- Convenient Home function allows pipettes to be quickly repositioned
- Assignable axes permit any orientation of the manipulator
- Easy-to-read vacuum fluorescent display
- Remote computer control via serial interface
- Compact design easily adaptable to your setup
- Universal mounting system for headstage or pipette holder
- 505089 includes manipulator, rack mount controller unit, rotary optical encoder, cables, rod holder, hinged headstage mount, 4" dovetail extension, mounting adapter plate, choice of input device, power cord, and manuals
- 505090 includes manipulator, table top controller unit, rotary optical encoder, cables, rod holder, hinged headstage mount, 4" dovetail extension, mounting adapter plate, choice of input device, power cord, and manual
Applications
-
Micromanipulator applications requiring nanometer resolution with precise control
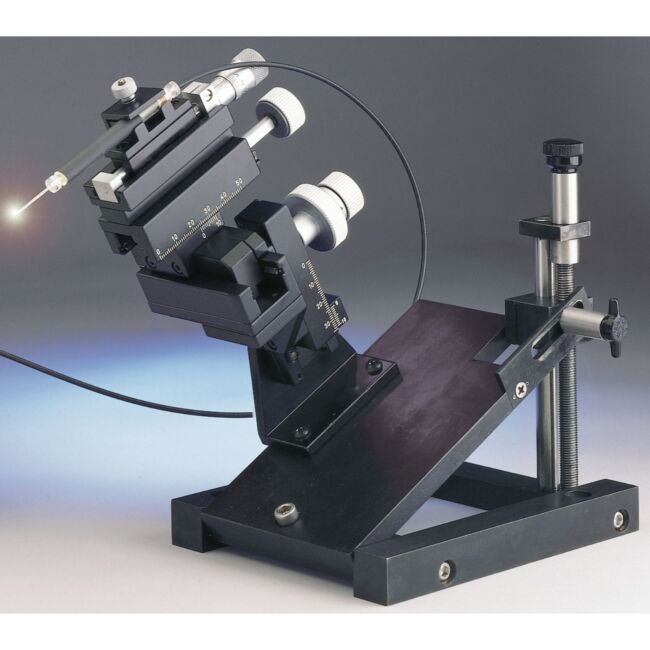
The SU-MP285 was designed to meet a wide variety of positioning needs for the scientific community, and is suitable for patch clamp experiments, extracellular recording, microinjection, intra-cellular recording and precision robotic positioning applications. An outstanding feature of this system is the unique definable 4th axis for diagonal advancement of the pipette. You select the angle, then activate the 4th axis. As with the other three axes, you may move with adjustable coarse or ultrafine resolution, select the movement speed, and move continuously or in single step increments. To quickly reposition the pipette, simply select the Home function. Axes positions are continuously shown in relative and absolute scales, and are easily readable on the vacuum fluorescent display.
The extremely low backlash of the SU-MP285 removes traditional drawbacks of “open loop” technology and eliminates drift. This allows submicron resolution down to 0.2 µm in the coarse range and down to 40 nm in the fine range. With over 1 inch of motorized travel on all three axes, and a user designated 4th axis, the SU-MP285 allows tremendous range of motion while maximizing resolution.
In all our manipulators, the 4th axis can be set up and changed without the need to connect an external computer and download and configure software. Unlike other designs, the virtual 4th axis in the SU-MP285 can comprise any two axes–conventional X-Z to approach along the pipette axis, Y-Z used when the manipulator is rotated 90 degrees, and you can even set up a virtual diagonal in the X-Y plane: useful when the manipulator is set up as a 3DMS (3D movable stage) and one wants to quickly move along the diagonal between two points on a horizontal specimen.
Available with a table-top or rack mounted controller, our manipulator fits in seamlessly with your other components while the compact design and assignable axes of the SU-MP285 allows you to easily integrate it into your setup at any orientation. To add to its practicality, your choice of one of two manual controls: joystick or rotary optical encoder (ROE), assures a comfortable experimentation environment, customized to the scientist.
For users who require repeatable motion sequences, the SU-MP285 features easily programmed robotic control from the keypad, or via a remote computer. The system can store up to 500 position instructions, including pauses, and will execute the instruction set once, continuously, or in reverse.
Choice of two Input Device Options
- Rotary Optical Encoder (ROE) - Turning one of three 2-inch knobs produces a movement along one axis proportional to the amount and speed of the turn. Buttons allow the activation of “4th axis”, change of movement resolution, “home” return function, and toggle between continuous/pulse movements.
- Joystick - Our joystick is a modified three-axis game controller. The degree of handle deflection determines the velocity of movement of each axis. In pulse mode, a button commands the manipulator to take a single step in the axis selected by joystick deflection.
| SKU | VAR-8374 |
|---|
Upsell Products
-

SU-MPC200 Motorized Micromanipulator Controllers
As low as $2,041.00
Related Articles



Video
Micromanipulation
Instructional Videos
| Travel | 25 mm (1") on all three axes |
| Resolution | Low: 0.2 µm/step High: 0.04 µm/step |
| Maximum Speed | 2.9 mm/sec |
| Long Term Stability | < 10 nm/hour at 24ºC |
| Drive Mechanism | Precision worm gear, Capstan drive |
| Serial Interface | RS-232, 9600 baud (1 start bit, 8 data bits, 1 stop bit) |
| Dimensions | Controller 40.6 x 27.3 x 9.6 cm (16 x 10.75 x 3.75") Mechanical: 11 x 15 x 16 cm (4.5 x 6 x 6.25") |
| Weight | Controller: 4.5 kg (10.7 lbs.) Manipulator: 1.7 kg (3.85 lbs.) |
| Power | 115/230 V, 50/60 Hz |
CE and RoHS compliant
Related Products
Check items to add to the cart or
-

SU-MPC325 Motorized Micromanipulator Systems
As low as $6,374.00 -

 As low as $2,950.00
As low as $2,950.00 -
 As low as $8,970.00
As low as $8,970.00 -

Quad 4-Axis Motorized Micromanipulator
As low as $9,520.00 -

SU-MPC365 Motorized Micromanipulator Systems
As low as $12,340.00 -
SU-MPC200 Motorized Micromanipulator Controllers
As low as $2,041.00 - $10,963.00
- $21,336.00